
Yeni doğmuş bir zurafa ya da antilop icin, doğarak gelmek dunyaya tehlikeli bir giriş yapma anlamına gelir. Avcılar, surunun en zayıf uyesinde yemek icin fırsat kollarlar. Bu nedenle bir cok tur, doğar doğmaz ayakta kalabilmek uzere evrimleşmiştir.
Bu ay icinde USC Viterbi Muhendislik Okulu ’dan bir grup bilim insanı, biyologlar ve robotikcilere uzun suredir ilham veren hayret verici bir gelişmeyi ilk kez gercekleştirdiklerini bildirdiler. Hayvanlardakine benzeyen, yapay bir tendon sistemini kontrol eden bir yapay zeka; daha once acıkca hicbir şekide konuyla ilgili programlanmamış olmasına rağmen, her bir adımda biyomekaniğini duzelterek, kendi kendine adım atmayı oğrendi.
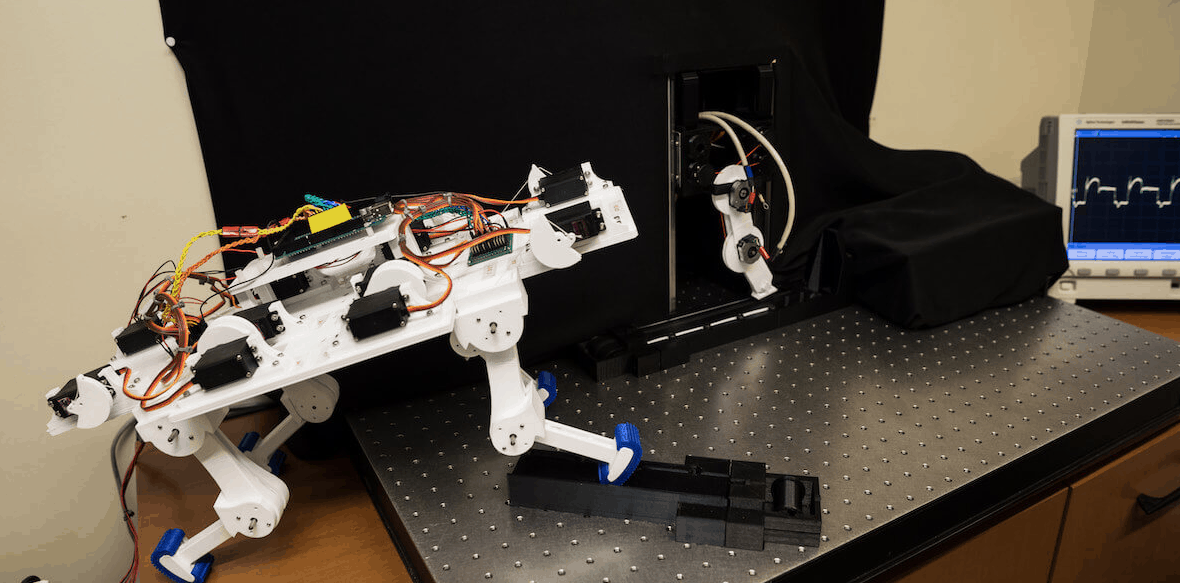
UCS Biyokinesiyoloji ve Fizik Tedavi Bolumu ’nde gorevli Biyomedikal Muhendisliği Profesoru Francisco J. Valero-Cuevas ve USC Viterbi Muhendislik Okulu ’ndan doktora oğrencileri Ali Marjaninejad, Dario Urbina Melendez ve Brian Cohn, yalnızca 5 dakika icinde kendiliğinden yurumeyi oğrenebilecek ve herhangi bir ek kodlama olmadan verilen gorevleri yerine getirebilecek bir algoritmayı biyolojiden ilham alarak geliştirdiler.
Adaptasyon
Nature Machine Intelligence ’ın Mart ayı sayısının kapağında yer alan calışmaları ile ekip, insan hareketleri ve sakatlıklarını anlamak, duyarlı protezler geliştirmek ve uzay araştırmaları, arama kurtarma faaliyetleri gibi karmaşık değişkenlerin olduğu zorlu ortamlarda calışabilecek robotlar icin heyecan verici bir gelişme olduğunu duyurdular.
USC ’de bilgisayar muhendisliği, elektrik ve elektronik muhendisliği, mekanik ve havacılık muhendisliği ve norobilim alanlarında donanıma sahip laboratuvarlarında algoritmayı geliştiren ekibin direktoru Profesor Valero-Cuevas, “Bugunlerde bir robotun dunya ile etkileşime girerek hazır hale gelmesi icin aylar veya yıllar suren eğitimlere eşdeğer bir alışma suresi gecmesi gerekiyor. Ancak biz, doğada gorduğumuz turden hızlı bir oğrenme ve adaptasyon sureci elde etmenin peşindeyiz.” dedi.
“Her birimiz olimpiyat madalyası kazanma mecburiyeti ya da hevesi icinde değiliz”
Makalenin başyazarı olan Biyomedikal Muhendisliği Bolumu doktora oğrencisi Marjaninejad, bu gelişmenin; bebeklerde gercekleşen doğal oğrenme sureclerine benzer olduğunu soyledi ve ekledi; “Robotun ilk yaptığı şey serbest oyun (free play ya da motor babbling) sureciyle etrafını tanımak.”
“Bacağın bu rastgele hareketleri, robotun uzvunun icsel bir haritasını ve cevre ile etkileşimlerinin oluşmasını sağlıyor.”
Makalenin yazarları, mevcut calışmaların coğunun aksine, kendi robotlarındaki oğrenme surecinin; diğer orneklerde olduğu gibi paralel olarak simulasyon yapmaya ya da bir yol gostericiye gerek olmadan, yaparak (deneyerek) oğrendiğini acıkladı.Marjaninejad bu konunun ozellikle onemli olduğu noktasında vurgu yaptı:
“Yazılımcılar birden fazla senaryoyu ongorebilir ve bu doğrultuda kodlar yazabilirler. Ancak her olası senaryo icin bunu yapmaları mumkun değil. Bu nedenle onceden programlanmış robotlar kacınılmaz olarak başarısızlığa eğilimliler.”
“Ancak bu yeni robotlara, amacı doğrultusundaki deneyimlerle oğrenebilme becerisi verirseniz. Sonunda bir cozum bulurlar ve bu cozumu kullanarak ihtiyacları doğrultusunda adaptasyon kazanabilirler. Cozum her zaman mukemmel olmayabilir, ancak soz konusu icin yeterli bir cozum uretiyorsa yeterli olacaktır.”
Ve son olarak ekledi: “Her birimiz olimpiyat madalyası kazanma mecburiyeti ya da hevesi icinde değiliz -ya da bunun icin harcayabilecek zamanımız ve enerjimiz yok.”
Şampiyon
Profesor Valero-Cuevas ’nın USC ’deki laboratuvarında vucutlarını ve cevrelerini keşfetme becerisi amacıyla geliştirilen robotlar, istekleri doğrultusunda “yeterli” olan kişiselleşmiş hareketleri geliştirmek icin kendi ozgun deneyimlerini kullandılar.
Profesor Valero-Cuevas soruyor: “Koridordan gelen birini tanıyabiliyorsunuz, cunku belirli bir ayak sesi var, oyle değil mi?”
“Robotlarımız sınırlı deneyimlerini kullanarak bir probleme cozum uretiyor ve ardından kişiselleştirilmiş bir alışkanlık ya da “kişilik” haline geliyor. Biz buna “nazik yuruyen”, “ağır yuruyen” ya da “şampiyon” diyoruz.. adını siz koyun…”
Yardımcı Teknolojiler
Bu teknoloji icin potansiyel uygulamalar cok ceşitli. Ozellikle de kullanıcıya karşı sezgisel ve duyarlı robotik uzuv ve dış iskelet gibi -uzuvlarını kaybeden insanlar icin paha bicilemez olan- yardımcı teknolojilerin geliştirilmesinde.
Valero-Cuevas bu konuyla ilgili ,“Dış iskelet ve yardımcı teknolojiler doğal olarak hareketlerinizi yorumlayacak ve size karşı uyum sağlayarak isteklerinizi karşılayabilecek“ diyor.
“Cunku robotlarımız alışkanlıklarınızı oğrenebilir ve gunluk yaşamda ihtiyac duyduğunuz işler icin hareket tarzınızı taklit edebilir -hatta yeni bir şey oğrenirken, buyurken ya da zayıflarken bile.”
Bir sonraki adım Araştırma Ekibi (Solda Sağa)
Brian Cohn, Francisco Valero-Cuevas, Ali MarjAninejad ve Dario Urbina-Melendez. Araştırmacılara gore calışmaları, aynı zamanda zorlu uzay araştırma ve arama kurtarma gorevlerinde de guclu bir uygulanabilirlik kapasitesine sahip olacak. Yeni bir gezegene giriş yaparken, belirsiz ve tehlikeli bir arazide ya da belki de bir doğal afet sonrası bu robotlar, yanlarında onlara eşlik edecek bir insan bulunmadan yapılması gerekenleri yapabilecekler. Bu robotlar duşuk ya da yuksek yer cekimine, carşak kayalığa ya da yağmur sonrası camura cok hızlı adapte olabilirler.
Ustelik bu robotlar, elde ettikleri deneyimleri gelecekte uygun yerlerde yeni cozumler bulmak icin de kullanırlar.
Makalenin iki ek yazarı, doktora oğrencileri olan Brian Cohn ve Dario Urbina-Melendez araştırmalarına ağırlık verdiler. USC Viterbi Muhendislik Okulu ’nda Bilgisayar Bilimi doktora adayı Cohn, “Bir turun, bedenleri ve cevreleri değiştikce hareketleri oğrenme ve uyarlama yeteneği, başından beri evrim icin buyuk bir itici guc oldu.” diyor ve ekliyor:
“Calışmamız, robotlara kendi deneyimlerinden oğrenebilme ve adaptasyon becerisi kazandırmak konusunda bir adım teşkil ediyor, aynı hayvanlarda olduğu gibi.”
Bir diğer araştırmacı olan ve yaşamdan cesurca ilham alan robotların potansiyellerine inanan Biyomedikal Muhendisliği doktora adayı Urbina-Melendez ise; “Ben hayvanların birkac ay icinde geldiği ustalık seviyesini, yanızca birkac dakika icinde kazabilen kas gudumlu robotlar ongoruyorum.” diyor.
“Muhendislik, yapay zeka, anatomi ve norobilimi birleştiren calışmalarımız bunun mumkun olduğuna dair guclu bir gostergedir.”
Orijinal calışmaya aşağıdan ulaşabilirsiniz.
Ali Marjaninejad, Darío Urbina-Meléndez, Brian A. Cohn, Francisco J. Valero-Cuevas. Autonomous functional movements in a tendon-driven limb via limited experience. Nature Machine Intelligence, 2019; 1 (3): 144 DOI: 10.1038/s42256-019-0029-0